about me
I'm a robotics researcher at Carnegie Mellon University pursuing my M.S. in Robotics, working with Prof. Ding Zhao in the SAFE-AI Lab. I'm also mentored by Dr. Jonathan Francis in the Bosch Center for AI. My research focuses on enabling robots to better perceive, reason about, and manipulate their environments through learning-based approaches.
research interests
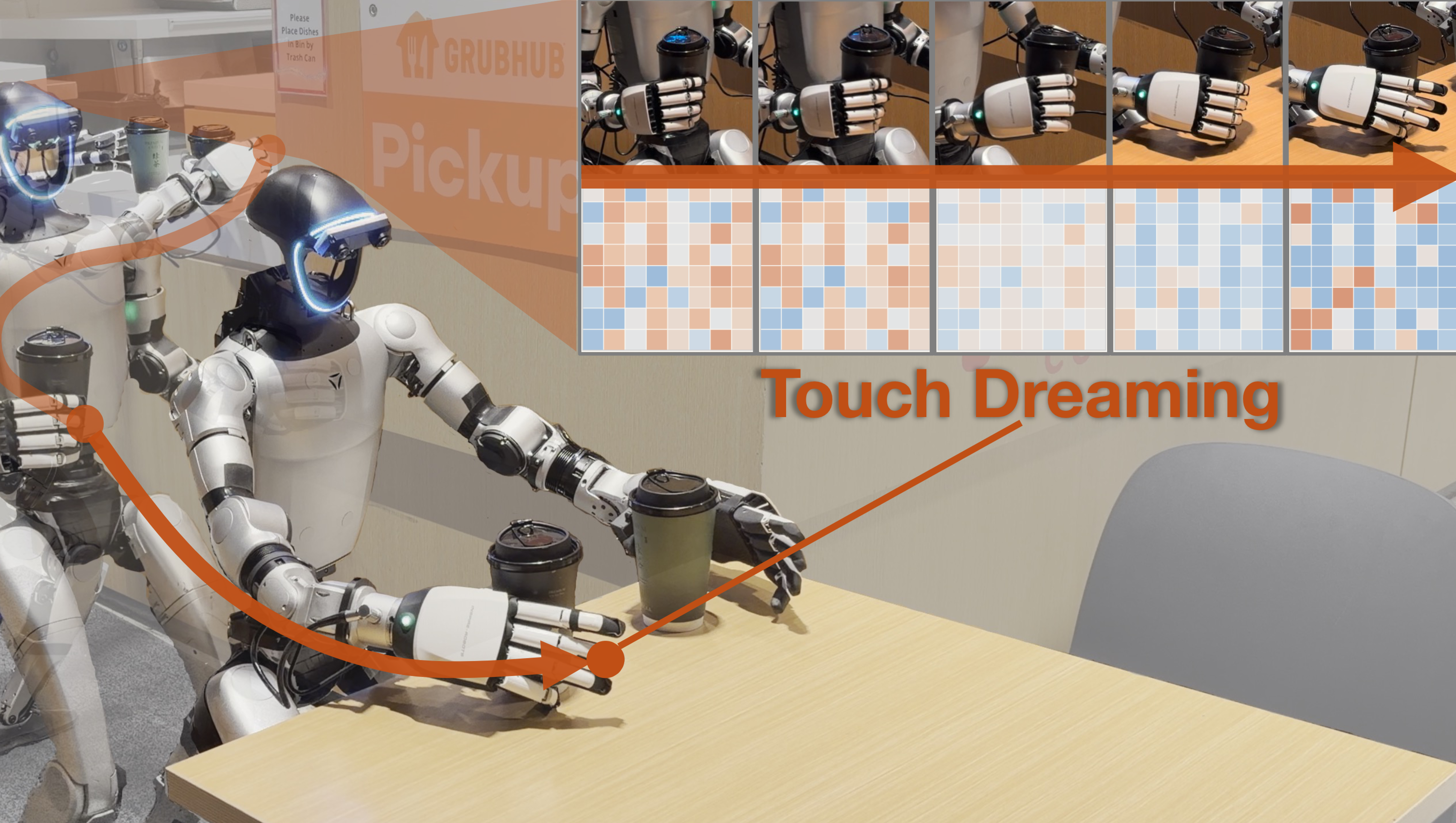
- Reasoned Perception & Manipulation: Developing robots that can understand and interact with complex environments through embodied reasoning
- Learning from Demonstrations: Enabling robots to learn manipulation skills from human demonstrations and videos
- Generalizable Policies: Creating robot policies that transfer across different embodiments and environments
- Human-Robot Collaboration: Building robots that can effectively assist humans in everyday tasks
Background: B.S. in Computer Engineering from Purdue University. Previously worked at AeroVironment Inc. as a Robotics Software Engineer and conducted research at Purdue's IDEAS Lab, SMART Lab, and the Air Force Research Laboratory.
Beyond Research: I play basketball, follow a lot of sports, play piano, and enjoy exploring new food spots.