ARTEMIS: AI-Driven Robotic Triage Labeling and Emergency Information System
Authors: Revanth Krishna Senthilkumaran, Mridu Prashanth, Hrishikesh Viswanath, Sathvika Kotha, Kshitij Tiwari, Aniket Bera
Status: Under review in IEEE-ICRA 2025

Incoming M.S. in Robotics @ Carnegie Mellon University
B.S. in Computer Engineering @ Purdue University
Robotics Software Engineer Intern @ AeroVironment Inc.
I'm going to be starting a Masters in Robotics at Carnegie Mellon University in Fall 2025. Having just graduated with a degree in Computer Engineering at Purdue University, concentrating in artificial intelligence/machine learning and computer systems, I am spending this Summer at AV as a Robotics Software Engineering Intern in MacCready Works R&D Department's Autonomy Team. I love robotics and want to work towards using robots to work with and improve humanity. I also want to improve the way robots perceive the world and increase the capability of using robots in a domestic setting with human beings.
Having done robotics research since 2021, I am stepping towards contributing significantly to the field. My primary interests at the moment include perception, manipulation and human-robot interaction and collaboration. While at Purdue, I also led the largest robotics club there (ARC), with a heavy focus on research.
Outside of these, I love playing basketball 🏀, the piano 🎹, geeking out over basketball and Formula 1 🏎️, and trying new foods!
[APR 2025] Accepted offer to start M.S. in Robotics at Carnegie Mellon University in Fall 2025.
[JUN 2024] MOCAS dataset paper ACCEPTED to IEEE-TAFFC 2024.
[APR 2024] Gave research talk at Purdue Spring Undergraduate Research Expo 2024 on ARTEMIS and won 2nd place in College of Science Category.
[JUN 2024] UPPLIED paper ACCEPTED to IEEE-IROS 2023.
[APR 2022] Gave research talk at Purdue Spring Undergraduate Research Expo 2022 and won 3rd place in Interdisciplinary Category.
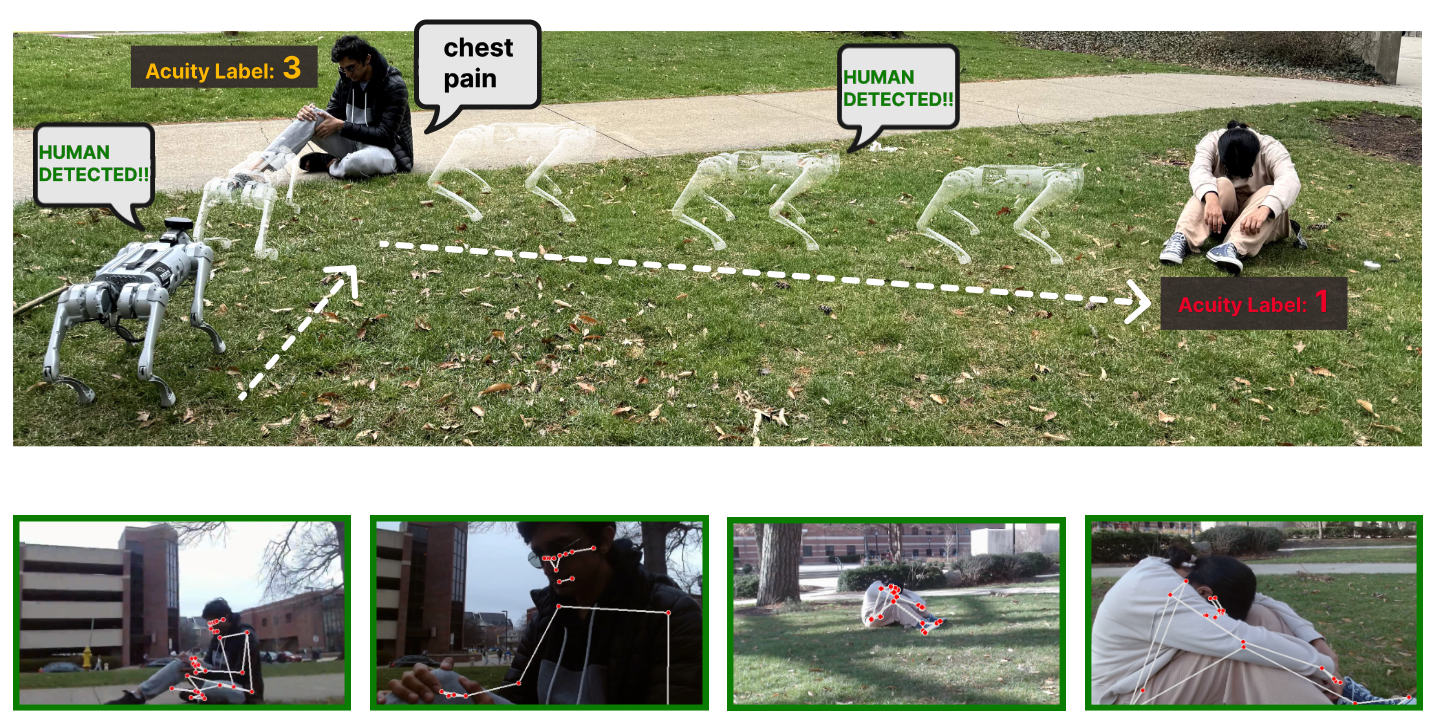
Authors: Revanth Krishna Senthilkumaran, Mridu Prashanth, Hrishikesh Viswanath, Sathvika Kotha, Kshitij Tiwari, Aniket Bera
Status: Under review in IEEE-ICRA 2025
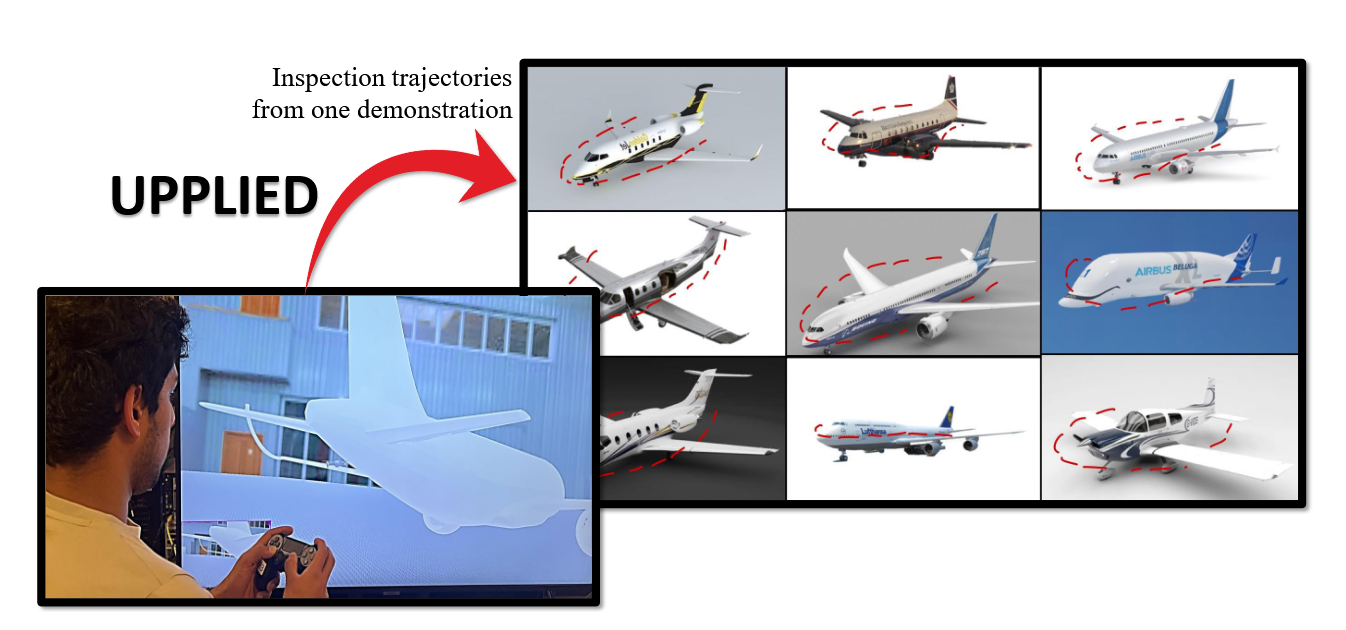
Authors: Shyam Sundar Kannan*, Vishnunandan L. N. Venkatesh*, Revanth Krishna Senthilkumaran, Byung-Cheol Min
* Equal Contribution
Status: PUBLISHED in IEEE-IROS 2023
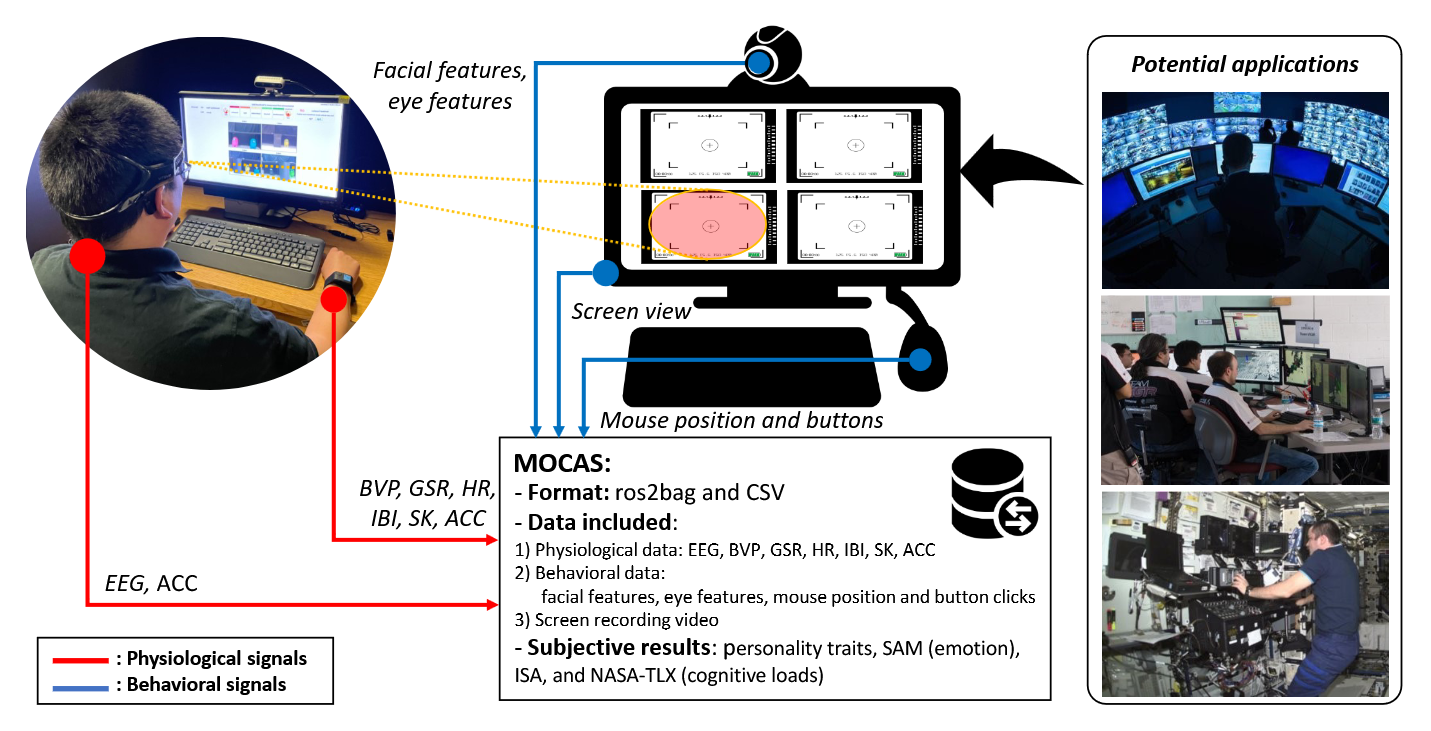
Authors: Wonse Jo*, Ruiqi Wang*, Su Sun, Revanth Krishna Senthilkumaran, Daniel Foti, Byung-Cheol Min
* Equal Contribution
Status: PUBLISHED in IEEE-TAFFC 2024
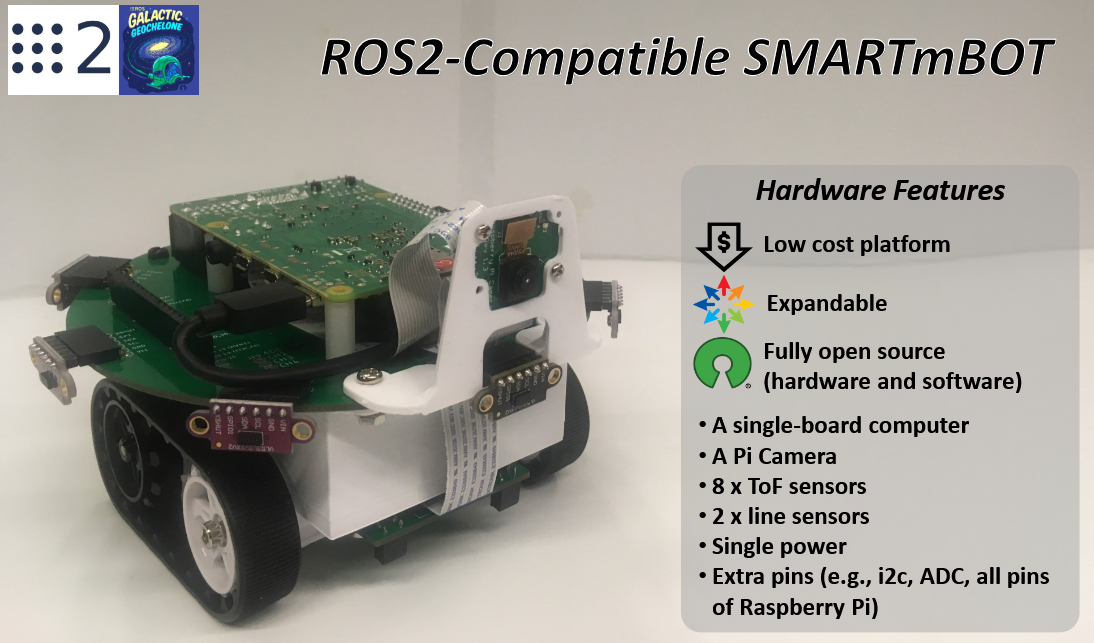
Authors: Wonse Jo, Jaeeun Kim, Ruiqi Wang, Jeremy Pan, Revanth Krishna Senthilkumaran, Byung-Cheol Min
Status: Submitted to IEEE-IROS 2022
Status: Presented at University of Minnesota Summer URC 2023

Status: Presented at Purdue Spring URC 2023
Status: Presented at Purdue Fall URC 2022
Status: Presented at Purdue Spring URC 2022